
Soft Robotic Endoscopy for Minimally Invasive Diagnostics
Clinical Stagnation
Traditional endoscopes are often limited by their inherent rigidity, leading to patient discomfort and restricted access to complex anatomical regions. Navigating the tortuous paths of the gastrointestinal or bronchial tracts requires a new generation of tools that can adapt their shape and stiffness in real-time. There is a need for cost-effective, and atraumatic navigation system that reduces operator fatigue and enhances patient safety.
The Engineering Challenge
To develop a sub-centimeter (8.5 mm) monolithic robotic tip capable of omnidirectional steering without the "ballooning" effect of traditional soft actuators. The system must integrate a high-definition camera and a 2.0 mm therapeutic tool channel without compromising the mechanical integrity of the soft body.
Proven Foundations
The key innovation of the paper is the development of the first origami-inspired, multi-channel, monolithic soft robotic actuator specifically designed for upper gastrointestinal (UGI) endoscopic applications. This design addresses long-standing challenges in soft robotics, such as fabricating complex geometries with small diameters while maintaining functional requirements like a central tool channel and limited radial expansion.
The core innovations and features of this actuator include:
• Origami-Inspired Corrugated Design: The actuator utilizes a "Pineapple Folding Pattern" (PFP), where the folds and creases act as pneumatically driven hinges. This allows the actuator to achieve high bending angles at low pressures by unfolding the corrugations rather than relying solely on the elastic strain of the material.
• Monolithic Single-Material Structure: Unlike previous designs that required multiple materials, fiber reinforcement, or mesh layers to limit radial bulging, this actuator is fabricated from a single elastomeric material (Dragon Skin 10). The corrugated geometry itself provides the necessary structural constraints to minimize radial expansion.
• Compact Multi-Channel Integration: The design successfully packs three inflatable triangular channels and a central hollow lumen (for an endoscopic camera or tools) into a sub-centimeter diameter of 8.5 mm. This is achieved with high packing efficiency, meaning the channels are accommodated within the minimal possible cross-sectional area.
• Superior Bending Performance: The actuator achieves a maximum bending angle of up to 200° when integrated with a manual endoscope handle. It demonstrates a linear relationship between actuation (pressure/volume) and angular position in the range of 30° to 150°, which is critical for precise endoscopic control.
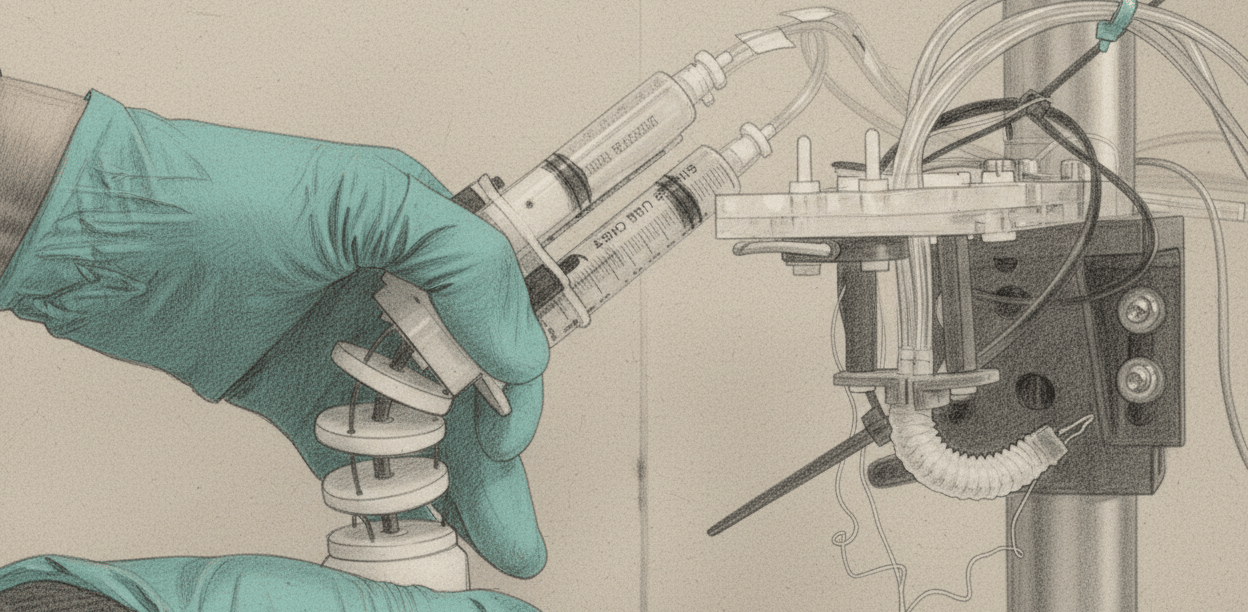
• Simplified Fabrication: The researchers developed a simple 3-step molding technique—assembling a customized mold, injecting silicone, and demolding—that allows for the creation of complex origami patterns in a soft structure without damaging the small features.
• Scalability: The design is highly scalable in both length and diameter, making it adaptable for various medical uses, such as nasal or pediatric endoscopy
Scalable Impact
Safety: Reduced contact force compared to rigid scopes, minimizing perforation risks.
Efficiency: High packing efficiency that integrates camera, tool channel, and 3-channel actuation into a single monolithic unit.
Cost: Designed for potential single-use (disposable) applications, eliminating the multi-billion-dollar burden of sterilization and repair contracts.
Key Outcome: A safer, more intuitive diagnostic tool that allows clinicians to reach deeper into the human body with precision and ease.
Ongoing Research and Experimental Validation
Our Approach At ReAMA Lab, we are developing a highly compliant, soft robotic platform for next-generation diagnostics. By integrating bio-inspired actuation and smart materials, our endoscope aims to provide superior maneuverability without the risk of tissue trauma.
Core Innovation: Utilization of fluidic actuation to achieve multi-degree-of-freedom steering.
Scientific Foundation: This work builds upon our previous research into demonstrating a proven path from concept to functional prototype.
Current Research (IP Protected): We are currently undergoing experimental validation of a novel steering architecture/actuation modalities designed to enhance tip maneuverability in high-friction environments. This current phase focuses on enhancing tip-tracking accuracy and integrating sensor-feedback loops for semi-autonomous navigation.
Proprietary Technology and Intellectual Property
The core technology of soft robotic endoscope are protected under institutional IP frameworks. To maintain commercial viability and safeguard technical innovations for our partners, full mechanical blueprints and control algorithms are not disclosed publicly. Qualified researchers and grant reviewers may request access to a confidential technical brief and demonstration videos via the contact section below.
Partner with Us
We are currently expanding our ecosystem and invite stakeholders to join the next phase of our journey:
For Industrial Partners: We are seeking collaborators for Licensing, Pilot Testing, and DfM (Design for Manufacture) to transition this technology into clinical trials.
For Funding Bodies: Our roadmap includes the integration of autonomous visual servoing and variable stiffness sensing—areas with high ROI for medical device innovation.
For Academic Collaborators: We welcome joint-research initiatives focused on haptic feedback and biocompatible material science.


Our current phase involves rigorous benchtop testing and phantom model validation to optimize control algorithms for semi-autonomous navigation.
Our team
Our strength lies in our individuality. Set up by Manish Chauhan, the team strives to bring in the best talent in various fields, from robotics, to clinicians and scientific researchers.


Manish Chauhan
Principal investigator
Arandeep Prehar
MEng (2024-25)
Currently Phd student at durham university
Ethan Simms
BEng (2025-26)
Contact
Reach out for collaborations or questions.
Phone
manish.chauhan[at]york.ac.uk
+44 (0) 1904 32 2361
© 2025. All rights reserved.